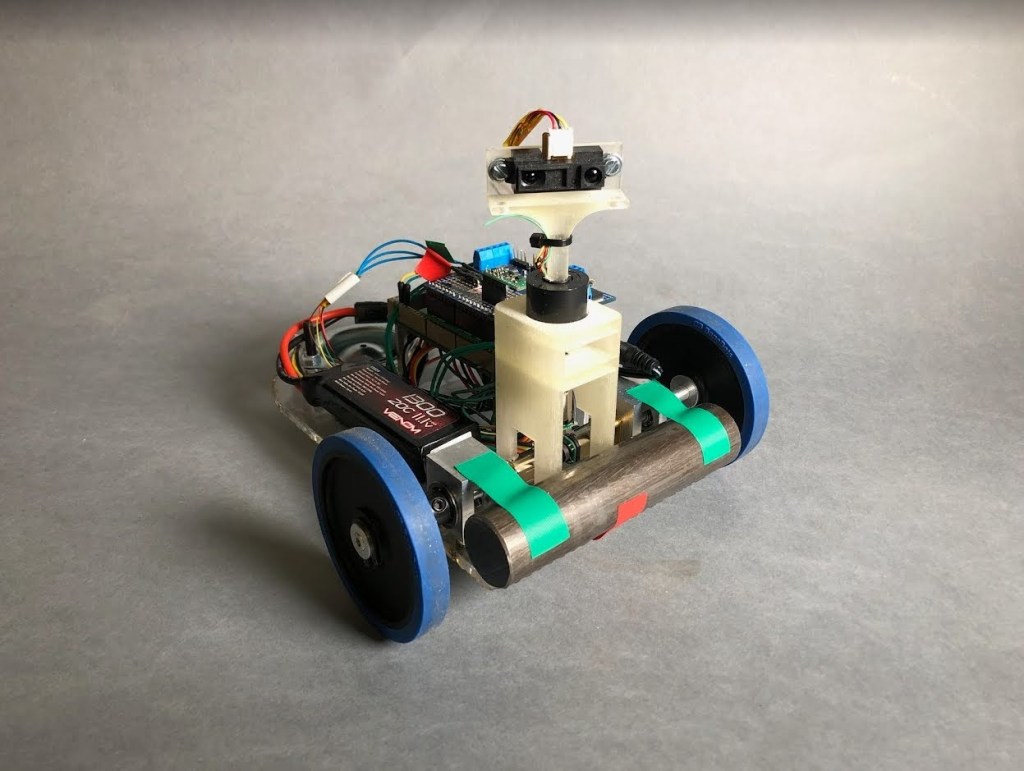
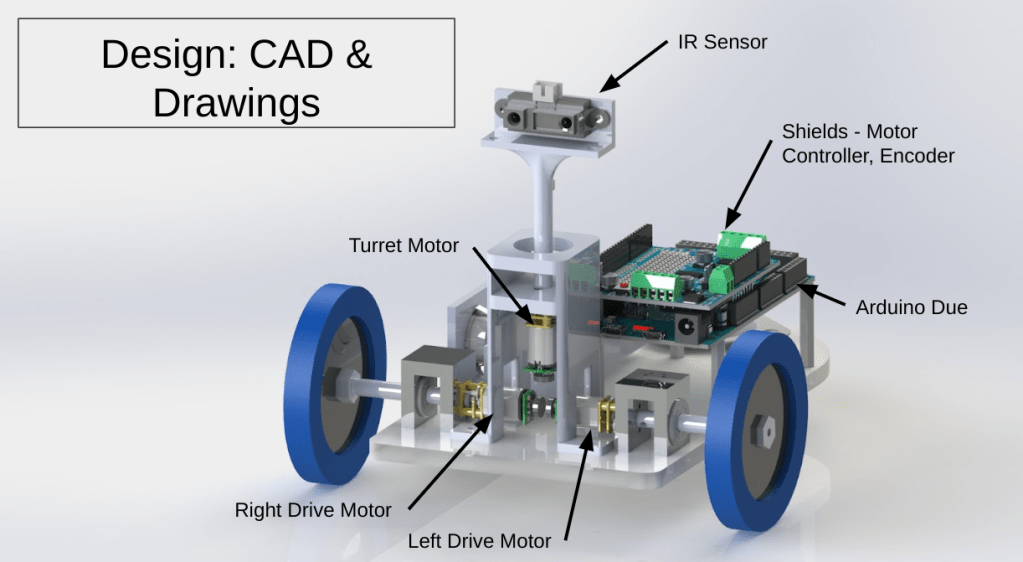
The final project for ENGS 147 was to develop a self driving robot to navigate a field of random obstacles from known start and end points. The prompt for this class was very open, we were free to choose all components ourselves and develop our own machine architecture. Our team went with a simple design with a 3D printed chassis, Arduino Due controller, and cheap DC motors, and an IR sensor.
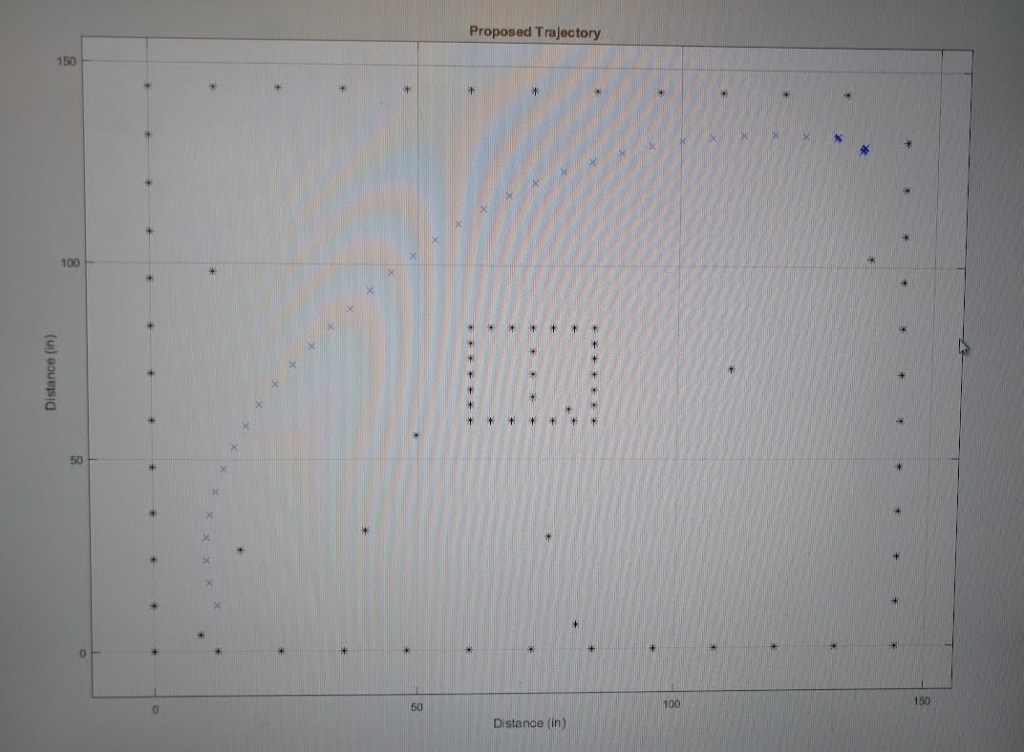
My main contribution to this project was to develop the navigation algorithm. I borrowed heavily from this Carnegie Mellon slide deck to develop a potential function algorithm. The math here was pretty straightforward, but it was a lot of work to build a digital test environment in MatLab, and to confirm that the machine was working correctly in real time.
We ended up having unexpected mechanical problems with weight distribution as well as motor slop. Additionally it seemed like having two IR sensors (one for short range and the other for long) might add some benfit. Overall we did have some successful runs through simple courses.